



人们揽镜自照时每每感慨早生华发,叹息时光流逝之快。是啊,时间都去哪了?我们可有方法记录它?其实时间的测量一直是人类面临的难题,也是我们生活中的大事。我们的各种活动都要按照时间的安排来进行,许多生产活动、导航、国防、宇航,以及科学研究都需要精确的时间系统,这次让我们来聊一聊人类是怎样记录时间的。

在武汉科技馆新馆二楼的宇宙展厅里,有一件叫做“时空测量”的展项,该展项分前后两部分,圆球正面部分放置了日晷模型,圆球背面的视频介绍了人类不同时期的时间测量工具的发展。
早期的天文计时器
远古时期,人们通过观察太阳方位确定时间,太阳的日出日落,自然界的四季交替,月亮的月圆月亏,让人类渐渐有了时间的观念,并开始简单的记录时间。
6000年前,人类发明了日晷这种计时工具,利用日影变化来标识时间。然而,日影的变化与地点和季节相连,一到阴天和夜晚就无法记录,于是人们发明了水钟,利用稳定的水流来标识时间,寒冷的天气水会结冰,沙漏就此出现。但是,这些计时工具都是不准确的,有时误差能到1小时,甚至更多。基于自然现象计时的装置各有其局限,要真正摆脱自然现象的限制,精确地掌握时间,有赖于机械钟的发明。

日晷模型,依靠“太阳”的投射方向来测定并划分时刻
虽然有人把上面这些装置叫做“太阳钟”和“沙钟”,但是这些不属于“钟表”概念的范畴,得到学术界一致公认的是,“机械钟”这一名词专指含有擒纵机构的计时装置,作为机械钟的灵魂,擒纵机构本质上是一种将动力等分的装置,擒纵机构形成的断续运动使人们对时间的想象从根本上发生了变化,时间不再是日影的周期连续循环,而是间断的瞬间的累积,因此,出现擒纵机构之前的计时工具,都不能算作机械钟。
那么,何为擒纵机构呢?擒纵机构是一种机械能量传递的开关装置,这个开关受“计时基准”的控制,以一定的频率开关钟表的主传动链,是指示“停—动”相间并以一定的平均速度转动,从而指示准确的时间。
“一擒,一纵;一收,一放;一开,一关”,擒纵机构将原动力系统提供的能量定期地传递给传递系使其不停地振动,并把传动系的振动次数传递给指示系统来达到计时的目的。因此,擒纵机构的性能将直接影响机械手表的走时精度。多年来人们不断研究和改进擒纵机构,目的就是为了提高时钟的运动稳定性和走时的精确度。
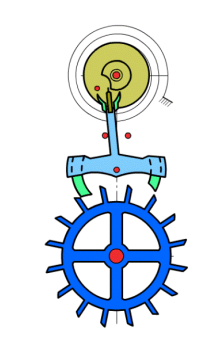
擒纵机构
“奇技淫巧”的机械钟表

14世纪初,位于欧洲的意大利、英国、法国等国的教堂等建筑物上出现了机械报时钟,因为报时钟的运行需要持续的动力来源,所以当时采用的方法就是用绳索悬挂重物,绳子的一端缠绕在一根轴上,重锤下落,带动轴转动,并将转动传递给守时机构。守时机构包括一套擒纵装置和横摆,擒纵装置主要由棘轮和带棘爪的心轴组成,心轴上方与横摆相连。当棘轮在重锤的带动下转动,上方的轮齿推开心轴上部的棘爪,使心轴转过一个角度,而这样刚好又使心轴下部的棘爪转过来挡在下方轮齿的去路上,棘轮继续转动将它推开后,心轴就转回原来的位置,完成了一次摆动。心轴每摆动一次,棘轮都转过一个相同的角度,而这种摆动的频率通过连在心轴上的横摆得到控制,从而具有等时性(如同单摆的等时性一样,这种等时性是可以用经典力学证明的),这样,将棘轮的运动通过中轴传递给表盘上的指针,指针就可以匀速转动了。这种钟的缺点在于,重锤提供的驱动力在维持主要机械部分运转的同时,也是推动横摆摆动的唯一力量,而这个推力是与横摆的摆动频率相关的,当重锤提供的动力经过数重机械结构最终传递到横摆以后,其间的误差已经积累得非常大了。因此这种钟走得“很不准确”,每天要差15分钟以上。
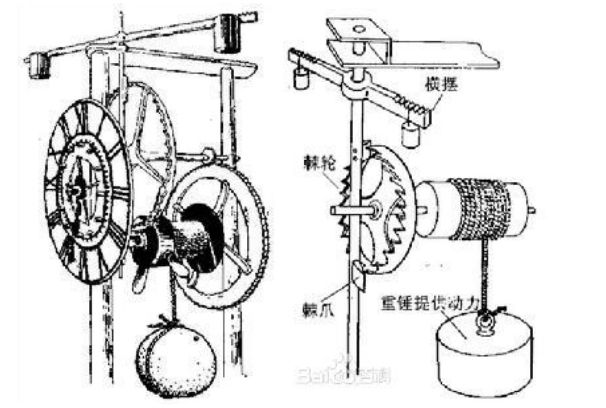
重锤式机械钟主要工作机构简化图
对改进早期机械钟做出重大贡献的是意大利科学家伽利略。16世纪末期,伽利略发现了摆的等时性原理,引发了17世纪钟摆的出现。传说在伽利略18岁那年,他在教堂发现悬挂的那些长明灯被风吹得一左一右有规律的摆动,他按自己脉搏的跳动来计时,发现它们往复运动的时间总是相等的。就这样他发现了摆的等时性。后来荷兰物理学家惠更斯根据这个原理制成了摆钟,人们称之为“伽利略钟”。这种钟的机械动力仍由重锤提供,L型杆的杆头分叉,刚好卡住刚性的摆棍,单摆摆动时带动L形杆摆动,从而把摆动的频率传递给擒纵器。摆钟的优越性在于因为单摆的频率与推动它的初始力无关,而只与重力和摆长有关,这样守时机构就不受动力机构的干扰了。这种摆钟计时的精确度因此大大提高,更重要的是,钟摆的发明使得制造小型时钟成为可能。
要求时钟可携带最初是出于航海的需要,掌握确切的方位是保证航海安全的重要条件,如果能精确测量时间差,就能测出两地的经度差,据此判断方位,但利用钟摆驱动的时钟无法在船上保持稳定,必须另想他法。
早在15世纪,人们就发现利用发条放松的力量能驱动机械,然而,发条驱动的时钟仍由摆控制,精确度还是不高,要使时钟摆脱重力的影响,而有赖于另一项等时性原理——弹簧振动周期性的发现,胡克和惠更斯分别发现了这一原理, 即弹性体变形与力成正比的定律,又称胡克定律。

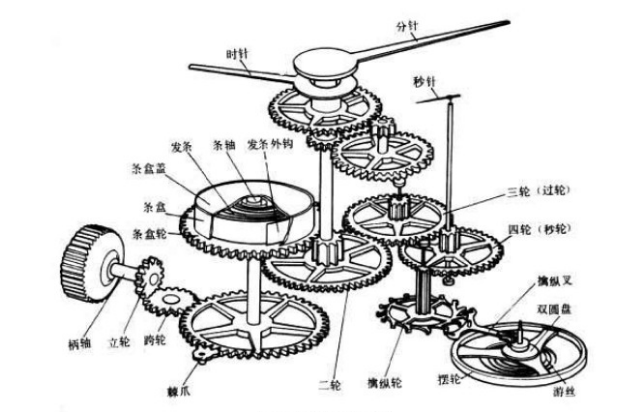
今天,如果我们打开手表的后盖,一下就能看到里面有一个带有头发丝一样的盘状小弹簧的轮子,它不停地有节奏的摆动着,这就是手表的心脏——利用弹簧的周期性原理制作的游丝摆轮系统。
它的工作原理是这样的:人们使用动力系统中储存的能量驱动擒纵调速器,由于要用一种可控的方式进行驱动,否则储存的能量可能一下就用完了,因此人们在发条和擒纵器之间安装了传动系,传动系由一组齿轮组成,动力系通过传动系驱动擒纵调速器,擒纵调速器由擒纵轮、擒纵叉、摆轮组成,它的作用是将动力系统的能量传递给摆轮,摆轮由摆轴、游丝等机构组成,摆轮启动后,游丝的弹性使得摆轮不断的旋动,反过来使擒纵叉保持精确又规律性的持续运动,来保持手表指示时间的准确性。
游丝摆轮系统与单摆一样独立于动力系统,其频率不受其他机械部分的影响,而且其优点在于不依靠重力,正由于它的发明,才终于使时钟摆脱了钟摆,出现了能随身携带的表,至此,当时的机械钟已具备了现代机械钟表的基本特征。
现在,一块好的手表拥有精密紧凑的装置,包含的精细零件,具有无与伦比的精度,集成于近乎显微级别的尺度上,其巧夺天工的技艺令人叹为观止。
给机械钟带来巨大挑战的石英钟
时间测量的精度取决于两个参数,分频装置的振动周期和驱动装置的稳定结构。机械钟内,摆轮的最高振频只能达到10赫兹,驱动装置采用发条,其松紧影响着机械钟表的精度,限于机构的固有缺陷,机械钟的精度一般只能达到日差10—120秒,更精确的计时需要原理上的突破。
直到上世纪20年代,最精确的时钟还是依赖于钟摆的有规律摆动。超越它们的是更为精确的石英钟。石英钟的主要部件是一个很稳定的石英振荡器,将石英振荡器所产生的振荡频率取出来,使他带动时钟指示时间,这就是石英钟。1928年,著名的贝尔电话实验室的马里森制造了世界上第一座石英钟。石英的振荡频率高达几千到几万、几百万赫兹,其分频效能远非齿轮可以匹敌,维持振荡、驱动指针的工作由电子完成,电能驱动技术和高频振荡技术相得益彰,目前,最好的石英钟,每天的计时能准到十万分之一秒,也就是差不多270年才差一秒,时间测量的精度取得了巨大进步。
精确到不可思议的原子钟
根据爱因斯坦的理论,在引力场内,空间和时间都会发生弯曲,因此,在珠穆朗玛峰顶部的一个时钟,比海平面完全相同的一个时钟平均每天快三千万分之一秒。要想精确测定时间的时间差异,唯一的办法只能是通过原子本身的微小振动来控制时钟。
量子力学的发展为更精确的时间测量提供了条件,利用原子跃迁时释放的电磁波共振频率的一致性,可以定义小得多的时间间隔。例如铯原子133的共振频率为每秒9192631770周。1949年美国国家标准局使用氨分子作为磁振源,制成了世界上首台原子钟,1952年又制成了第一台铯原子钟,将时间测量精度提高到每100万年误差1秒,这个精度已经达到了天文数字的水平,然而,进一步提高时间精度的探索并未止步,现在,科学家们又研制出一种更新的光原子钟,精度比目前最好的铯原子钟更高。
从日晷、水钟、沙漏到机械钟、石英钟乃至原子钟,人类从最初对时间有了浅显的意识,到自己去定义时间,计算时间,利用时间,钟表经历的历史,又怎可仅用“拍案惊奇”一词来形容,而钟表在人类生产生活中的经历必然会继续跌宕起伏。(黄静)
请输入验证码