



在美国国防高级研究计划局(DARPA)的资助下,麻省理工学院计算机科学与人工智能实验室(CSAIL)和哈佛大学威斯研究所的研究人员联合研制了一种机器人“肌肉”。这种“肌肉”使用液压而非电动系统,具有较强的力量。据研究人员称,2.6克的机器人“肌肉”可以抓起3千克的物体,相当于“一只野鸭带走一辆轿车”,并且能够缩小到原始尺寸的十分之一,所需功耗也远远小于由金属和电路组成的传统机器人。
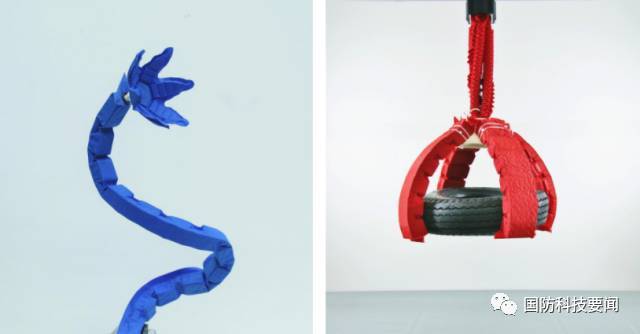
▲这种低成本的人造肌肉将可以让机器人抓取相当于自身重量1000倍的物体
新的机器人“肌肉”和动物肌肉组织有很多相似性。在人体存在肌肉的地方,机器人会相应地存在一种称为驱动器的部件。驱动器是一种用于控制各种动作的小型机械装置。然而,大多数驱动器是电动的,需要使用大量电池,这正是许多机器人无法应用于一些作战环境的原因。试想,谁愿意为了使用外骨骼而背负大量锂电池去穿越火线呢?
新的机器人“肌肉”采用液压驱动器。这种驱动器由精巧的金属“骨骼”或一些其他材料组成,折叠放入真空密封袋。将水或空气加入密封袋或者放掉时,压力的改变会导致骨骼和皮肤的伸展或折叠,从而产生抓、推等动作。研究人员称,这种“肌肉”有一个重要特征,即它们是可以程控或者说是可以设计的,对骨骼折叠方式进行设计,可以决定整个结构的动作。

▲人造肌肉可以完成抓、提、拧等动作
采取液动方式具有很多优势。比如,机器人可以更轻松地跑动,减少机器人完成预期任务所需要的计算机处理量。某种智能比如骨骼折叠方式的引入,将简化相关的算法。而且这种驱动器会使用相同的开关,从设计上有助于机器人做到更多的动作。此外,这种“肌肉”的重量较轻,可以拓展机器人的应用范围,比如软体外骨骼,人体植入式小型机器人等。
研究团队的研究论文即将发表在美国《国家科学院院刊》上。该论文(初稿)表示,人造肌肉有望为无数普通机器和机器人提供一种安全而强大的驱动方案。然而,人造肌肉的设计、制造和实现往往受到材料成本、工作原理、可扩展性和单自由度收缩驱动等因素的限制。为此,研究团队提出一种新的液压驱动、折纸式人造肌肉的概念结构。该概念仅需要3个组成部分:可压缩的骨骼、柔性皮肤,以及流体介质。研究团队开发了一个力学模型来阐述这3部分的相互作用关系,并介绍了一种能够快速生产低成本人造肌肉的制造方法。人造肌肉可通过程控完成多轴向的动作,包括收缩、弯曲和扭转。这些动作可以整合至具有多自由度的系统中,以完成不同快慢速度的、可控制的各种动作。人造肌肉支持负压(相对于环境的)流体驱动,比大多数其他正压液动人造肌肉安全。实验表明,这些肌肉可以在原始尺寸的基础上缩小90%以上,能够产生约600千帕的应力,最高功率密度超过2千瓦/千克。所有这些指标都等同于甚至超过天然肌肉。
▲研究团队论文(初稿)
来源:美国“防务一号”网站/图片来自互联网
王璐菲
来源:“国防科技要闻”(ID:CDSTIC)
请输入验证码