




长江日报大武汉客户端11月17日讯(记者杨佳峰 通讯员孙彦钦)不仅能抓薯片、抓豆腐,还能抓青蛙。近日,中国地质大学(武汉)自动化学院智能机器人系统实验室赖旭芝教授团队研发出一款刚—柔—软结构仿人手指机器人,该机器人手指融合了多种材料的优势,兼具刚性手指的高承载能力与柔性手指的灵活性和安全性,适用于抓取超脆性物体。
中国地质大学(武汉)自动化学院智能机器人系统实验室研究团队(第一排左六为赖旭芝教授,第三排左一为孟庆鑫教授)。
从12克的小番茄到1千克的3D打印耗材、从鸡蛋到卷心菜、从A4纸到气球、从三指抓取到双指抓取……研究团队通过大量实验,验证了装有该仿人手指机器人的抓持器在不同质量、硬度、尺寸和形状的情形下具有良好的抓取能力。
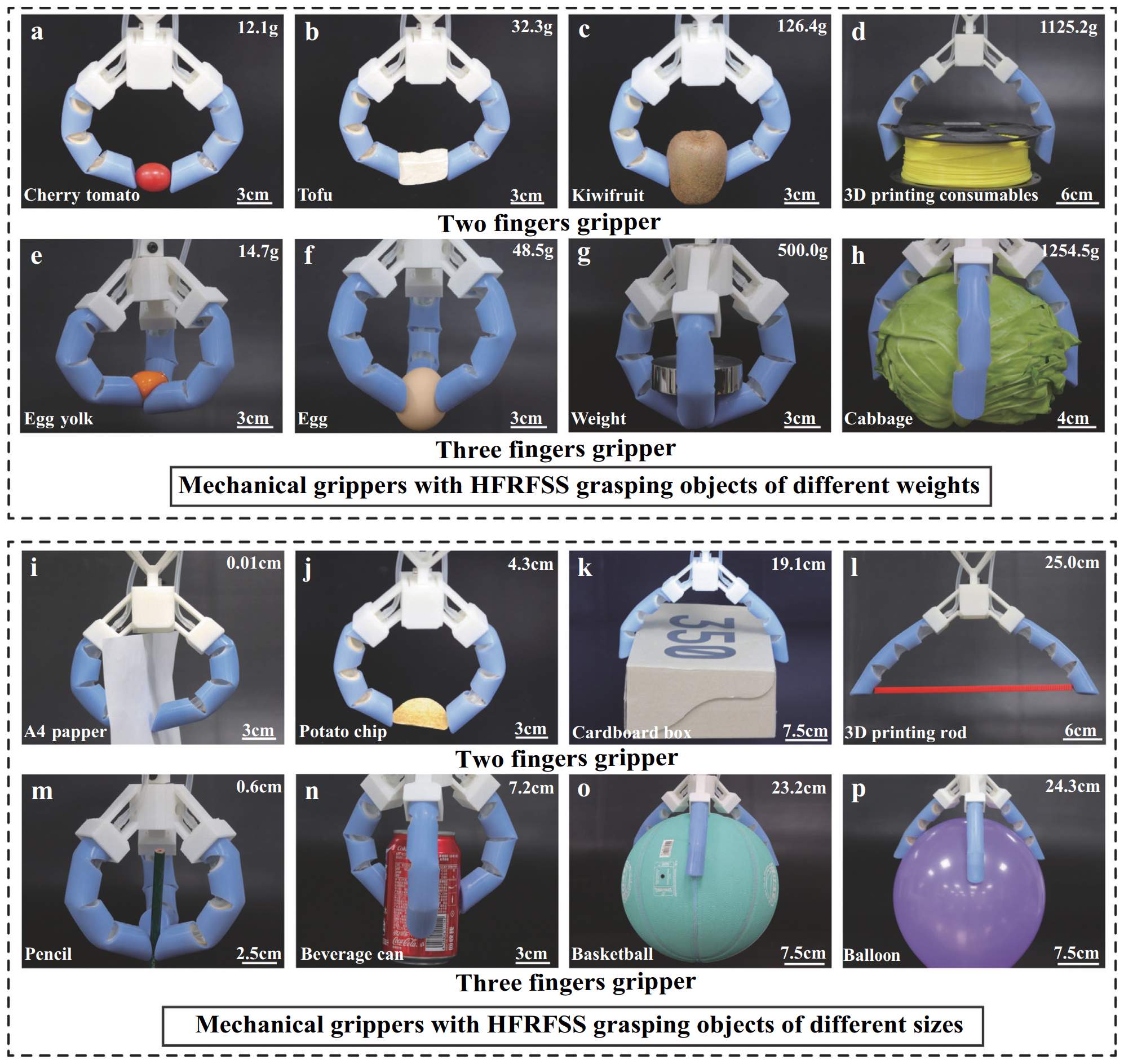
装有仿人手指的抓持器能够抓取不同重量、硬度、形状和大小的物体。
据悉,仿人手指由刚性管状骨骼、柔性关节弹簧、气动薄膜驱动器和软体硅胶皮肤组成。这种结构确保了该仿人手指的刚度和稳定性,同时使其具有类似人手的柔顺输出力,且不占用额外空间。
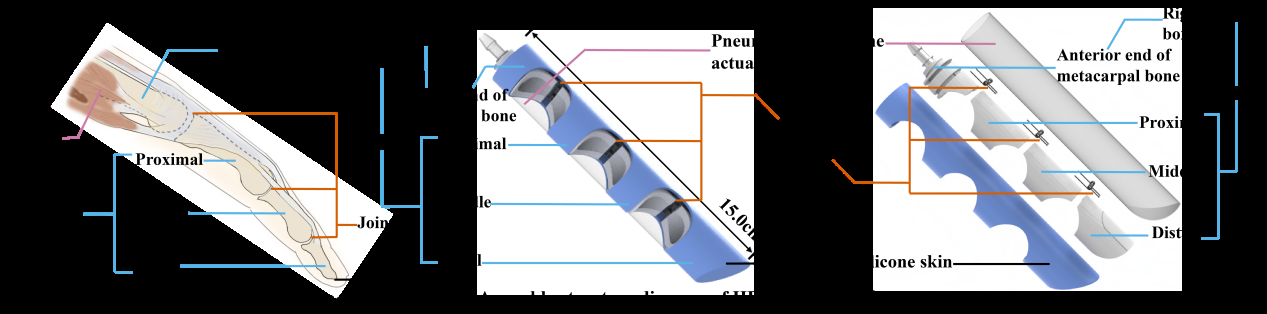
仿人手指的刚—柔—软结构仿照人类手指设计。
记者看到,在抓取豆腐、薯片、青蛙的实验中,装有仿人手指的抓持器连续抓取豆腐20次,均未造成任何破损或碎裂;
多角度抓取薯片,薯片也完整无裂纹,未破碎也未掉落;在抓取转移活体青蛙时同样应对自如,未出现失误。
“刚—柔—软结构仿人手指结构简洁、成本低廉,能够在复杂环境中实现对多种物体稳定、安全且灵巧的抓取,有望成为人类手指的有效替代方案。”该研究团队成员、中国地质大学(武汉)自动化学院教授孟庆鑫表示,该新型仿人手指能够安装到任何人形机器人上,为医疗康复、食品处理、智能服务、智慧农业等需应对多样化、复杂任务的机器人应用领域开辟了新的可能。
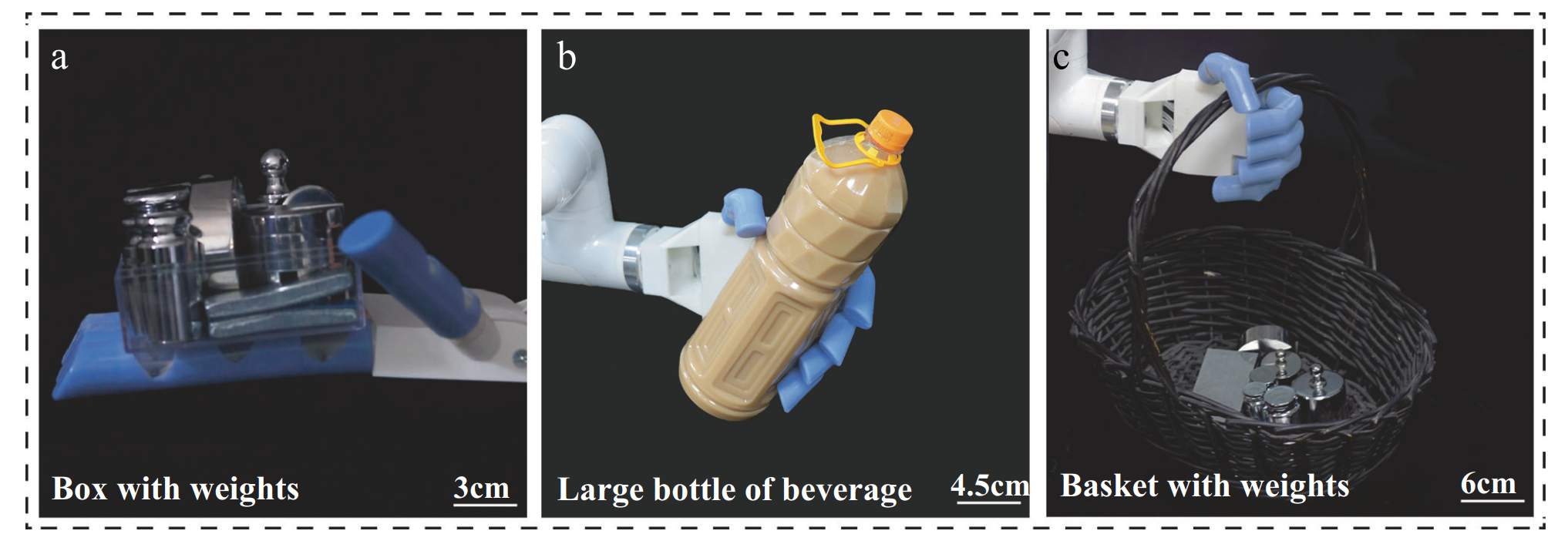
装有刚—柔—软结构仿人手指展示抓取和负重能力。
据悉,相关研究成果发表在《自然》子刊《自然·通讯》上。
近年来,由赖旭芝教授领衔的智能机器人系统研究团队,开展了一系列先进智能机器人设计、建模与控制方法的研究,实验室研究范围涵盖气动机器人、介电弹性体机器人、磁驱动机器人、液态金属机器人等诸多科研项目。
【罗田甜】
请输入验证码