




公元2259年的纽约,飞行器在摩天大楼之间灵活穿行,勾勒出一幅空中交通图景。这一幕,正是30年前法国科幻电影《第五元素》中的经典画面。在武汉大学测绘遥感信息工程全国重点实验室唐炉亮教授的电脑中,这段珍贵的视频一直被精心保存。在他眼中,“未来低空飞行就是这个电影中的场景,这正是低空经济的理想形态”。
自2021年纳入国家交通发展规划以来,低空经济被视为战略性新兴产业的重要支柱,因飞行安全问题而发展缓慢。现有空域管制模式又难以支撑高密度飞行需求。
武汉低空“天路图”的出炉,破解了飞行安全与规模化飞行的制约瓶颈。航线达到700条,2000个起降点,总里程4000公里,低空飞行器保有量可以达到武汉现有汽车保有量的2至3倍,这张“天路图”是如何画出来的呢?
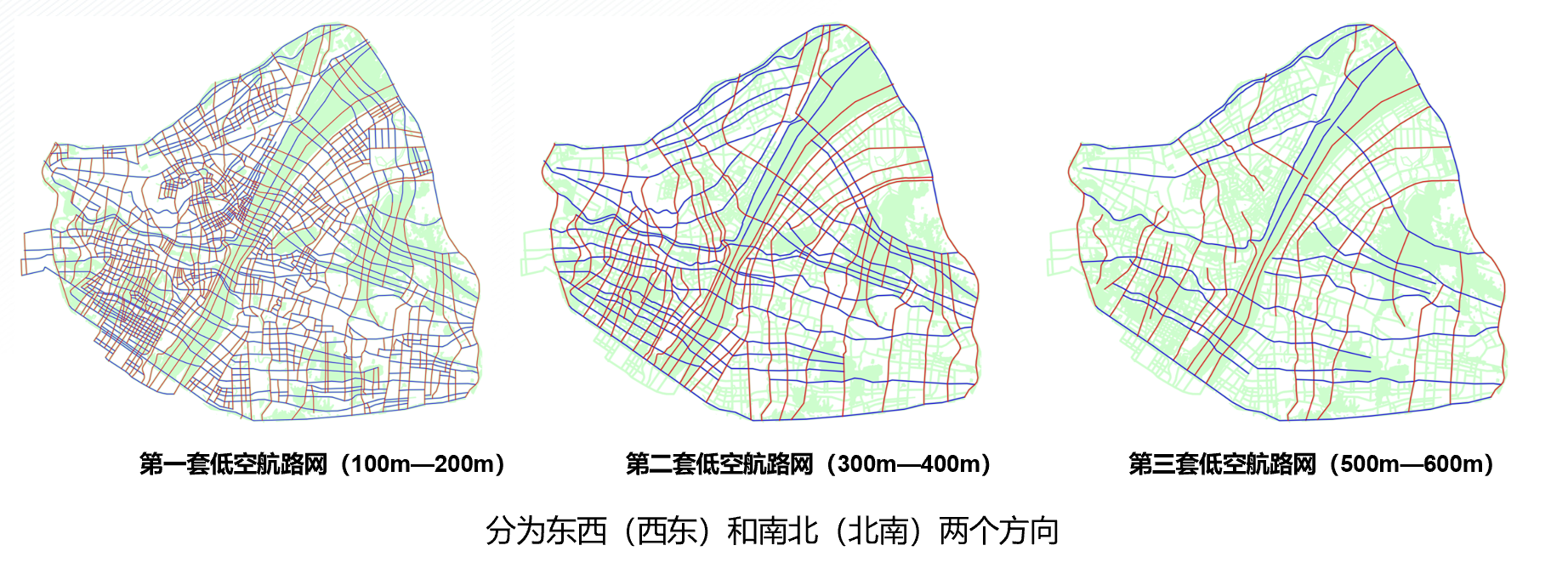
唐炉亮团队绘制的武汉“天路图”,三套航路密度不同。
低空飞行不是按地面道路飞
在研发低空飞行地图时,唐炉亮团队曾面临两种思路的抉择:一是采用高空民航稀疏飞行依赖的空域管制模式,二是效仿地面道路稠密车流依赖的道路规则模式。然而,这两种方案均未能满足低空飞行的实际需求。
“‘天路图’不是地面道路图的简单抬升。”在唐炉亮看来,低空经济的安全体系应参照地面稠密车流模式构建,而非高空民航的稀疏规则。仿照地面道路模式直接将地面道路“抬升”到空中,让飞行器沿地面车道飞行,构筑低空飞行器的“天路图”,这种思路忽略了低空飞行的风险性、立体性与动态性。
在研究中,唐炉亮发现,无人机飞行的最优区域是森林、绿地公园、 水系湖泊及湿地,其次才是道路。道路区域存在多重风险:车流量大、人流密集,早晚高峰时段拥堵严重,已达中度以上风险;恶劣天气下,拥堵情况会进一步加剧。“我们希望构建一种基于投影与映射的飞行规则和安全秩序,这是一种前所未有的广义地图,属于全新的地图范式。”唐炉亮表示。
唐炉亮所说的“中等风险”是他们在飞行系统动态和静态的风险计算结果:静态风险因子包括建筑高度、密度等;动态风险因子通过手机轨迹、信号数据及热力图获取,能精准反映人员分布与移动模式。团队整合静态与动态因子,将区域划分为无风险、低风险、中风险、高风险、禁止飞行五级。“公路上车多人多,飞行器有掉落的风险。”
唐炉亮将武汉低空划分出五级风险区。记者杨佳峰 摄
唐炉亮表示,武汉“天路图”如同在低空构建了一张“数字化航路地图系统”。该系统借助数字化平台,全面描绘风险因素、航线要素、飞行规范及其动态演变,为飞行路径规划与导航提供有力支持,从而突破低空经济规模化飞行的安全瓶颈。
今年初,唐炉亮将这一成果发表在《科学通报》上,引来广泛关注。
三套六层航路无“红绿灯”
在唐炉亮的“天路图”中,武汉低空被绘成三套六层航路网。同层航路平行无交叉,相邻层航路方向近似垂直但不相交,对应不同密度与速度需求。如100米、300米、600米为相同航向(如东西向),200米、400米、600米同为垂直方向(如南北向)。如高度100米、200米为高密度低速航路层,适合短距离高频次飞行;300米、400米对无人机性能要求更高,未来可用于高速长距离飞行;500米、600米航路层,可以实现市内最远距离低空飞行。
三套航路采用“低空密集、高空稀疏”的原则,其间距按100米、400米、1600米划分。“这样的设计有什么优势呢?可以让有人驾驶的飞行器,看到其头顶与脚下的飞行器,都是同向飞行,避免低空飞行器像我们看到的3D电影里,子弹直射面部而来,让驾驶司机感到惊恐。”因为人对左右间距的判断相对容易,但在垂直方向的距离难以感知,尤其是远距离更无法判断。因此,同向飞行的设计能大幅降低有人驾驶时的恐慌感。
“低空飞行无需设立空中‘红绿灯’。”唐炉亮告诉记者,“数字化航路地图系统”作为低空经济的重要公共基础设施,自诞生起便具备三维立体、实时动态且覆盖密集的特性。该系统能够精准评估不同区域、不同高度的飞行风险,构建起安全的网络连接体系:通过将地面土地利用状况及人类活动的潜在影响投射至低空各高度层,科学计算出低空飞行的风险指数,从而规划出一条条安全可靠的飞行通道,实现适飞区域之间的无缝衔接。
“每架无人机飞行时,需预留一立方体安全空间以避免碰撞。”唐炉亮介绍,现在在北斗卫星帮助下绘制的城市实景三维地图,能获取厘米级甚至毫米级精度的建筑物数据,完全能满足无人机规避碰撞的精度需求。至于空中同向追尾碰撞,无人机自身防撞功能便能规避。
2000个起降点有讲究
在武汉大学测绘遥感信息工程全国重点实验室,记者注意到,武汉“天路图”上除4000公里航线外,还有2000个起降点和不少应急点。
唐炉亮介绍,“天路图”模型的核心逻辑是:先计算飞行区域内的风险,包括人员密度、建筑物分布、无人机噪声等,再根据风险等级划分禁飞区(黑色区域)和适飞区(白色区域)——这与国家当前公布的“适飞空间”不同,国家当前公布的是“可飞空间”,“可飞空间”经过风险评估后的低风险区域才是“适飞空间”,而非简单的开放区域。
在适飞区内,唐炉亮团队通过算法生成航路骨架,优先选择直行长度最长的方向(如图中红色为主要方向,蓝色为垂直方向),而起降点的设定则确保了通航效率与连续性。
比如,飞行器在100米高度沿东西方向飞行,若要转向南北方向,无需在空中转弯,可直接前往路边的起降点。这些起降点选在公园、绿地等无建筑物遮挡的净空区域,且严格实行起降分离:起降点设置在道路两侧,一侧专门用于降落,另一侧用于起飞。
“起降分离能有效避免碰撞——降落的飞行器完成任务后会迅速离开,后续飞行器可依次降落,不会出现同一区域既起飞又降落的混乱情况。”唐炉亮表示,起降区不一定距离很远,甚至可在同一起降场内分设起降区域,中间通过通道连接。比如100×100米的起降场,飞行器降落后可通过自动通道转移到起飞区,完成装卸后即可起飞。
武汉“天路图”得天独厚
“武汉独特的自然禀赋,在低空经济领域具备独特优势。”唐炉亮告诉记者,武汉江湖湿地资源丰富,过去道路被水系分割是劣势,如今却成为低空飞行的天然优势。长江水面、湖泊、草地为无风险区域;无风险与低风险是最理想的飞行区域,中风险可选择性飞行,高风险与禁飞区禁止飞行。“为避免飞行路径不连续,我们将风险区域聚合后,再形成连续的适飞区方便应用。”
唐炉亮取出武汉、杭州的飞行风险分布图比照,代表低风险可服务区域的绿色,武汉更多。“这与武汉的湖泊、河流多、绿植广有关,这些区域直接决定无人机保有量。经初步测算,武汉中低风险及无风险区域,无人机容量可达现有汽车保有量(约500万辆)的2倍。
记者看到,在唐炉亮团队设计的武汉六层航路网络的动画演示中,从汉阳国博中心到汉阳市政科研中心的航线,穿过六层航路网络,每层都有明确的轨道划分。整个系统就像六层叠加的地图,从空中俯瞰,同一垂直空间内同时运行6架飞行器。
“我们的风险计算涵盖人口密度、建筑物、路网、噪声等多个维度,通过模型算法支撑航路生成。”唐炉亮介绍,要解决无人机配送的“最后一公里”问题,核心是让快递尽可能接近用户。目前武汉的风险计算已完成,后续将通过无人机模拟验证低空航路的可行性。
未来,有了“天路图”的保障,低空飞行器(无人机)上天,无需提前申请“路权”,只需接入飞行管控系统即可“上路”。就像现在开机动车无需申请,只要有驾照、行驶证便可上路。“起飞前,系统会像百度、高德导航一样,根据起点和目的地规划低空飞行路径,只要沿规划路径飞行,就能保障安全。”唐炉亮表示。
(长江日报记者杨佳峰 通讯员武柳青)
【罗田甜】
请输入验证码